Maxwell’s Equations in the special case with no time dependence.
The equations for the electric field
\(\mathbf{E}(x,y,z)\) are \(\nabla \cdot \mathbf{E} = \frac{1}{\epsilon_0} \rho, \ \nabla \times \mathbf{E} = \mathbf{0}\), where \(\rho\) is the charge density.
The Divergence Theorem, together with \(\nabla \cdot \mathbf{E} = \frac{1}{\epsilon_0} \rho\) says that
\(\displaystyle \iint_{\mathcal S} {\bf E} \cdot d{\bf S} =
\textstyle{\frac 1 {\epsilon_0} } \displaystyle \iiint_{\mathcal W} \rho \, dV = \textstyle \frac{1}{\epsilon_0} Q \),
where \(Q\) is the charge inside the closed surface \(\mathcal S\).
The fact that the curl of the (time-idependent) electric field is \(\bf 0\) says
that there is an electrostatic potential \(\phi: \mathbb{R}^3 \to \mathbb{R}\)
such that \({\bf E} = - \nabla \phi\).
The equations for the magnetic field
\(\mathbf{B}(x,y,z)\) are \(\nabla \cdot \mathbf{B} = 0, \ \nabla \times \mathbf{B} = \mu_0 \mathbf{J}\), where \( \mathbf{J}\) is the current density.
The fact that the divergence of the magnetic field is 0 says that there are no magnetic monopoles,
and there is a vector potential \({\bf A}: \mathbb{R}^3 \to \mathbb{R}^3\)
such that \({\bf B} = \nabla \times {\bf A}\).
Stokes’s Theorem, together with \(\nabla \cdot \mathbf{B} = 0, \ \nabla \times \mathbf{B} = \mu_0 \mathbf{J}\), says that
\( \displaystyle \oint_{\mathcal C} {\bf B}\cdot d{\bf r} = \iint_{\mathcal S} \left (\nabla \times {\bf B} \right ) \cdot d{\bf S} = \mu_0 \iint_{\mathcal S} {\bf J} \cdot d{\bf S} = \mu_0 I
\),
where \(I\) is the current going throught the closed curve \(\mathcal C\).
The equations get more complicated and interesting when you add time dependence. They describe light, the generation of hydro-electric power, and electric motors.
Section 17.3: Divergence Theorem Paul's notes
Assume that \(\mathcal W\) is a simply connected region in
\(\mathbb{R}^3\), and let \(\mathcal{S} = \partial \mathcal W\)
be the boundary of \(\mathcal W\), oriented outward.
Assume that the vector field \({\bf F}: \mathbb{R}^3 \to \mathbb{R}^3\) is defined and smooth on \(\mathcal W\). The Divergence Theorem says
\( \displaystyle \iint_\mathcal{S} {\bf F} \cdot d{\bf S} = \iiint_\mathcal{W} \nabla \cdot {\bf F} \, dV
\)
Justification of the Divergence theorem, pictures of the white board: Part 1.
We can approximate any shape with minecraft blocks, and then do Part 2
Divergence and Curl of 2-Dimensional Vector Fields:
Assume that \(\mathcal D\) is a simply connected region in
\(\mathbb{R}^2\), and let \(\mathcal{C} = \partial \mathcal W\)
be the boundary of \(\mathcal D\), and let \(\hat{\bf n}\) be an outward unit normal vector.
The Divergence Theorem says
\( \displaystyle \oint_\mathcal{C} {\bf F} \cdot \hat {\bf n} \, ds = \iint_\mathcal{D} \nabla \cdot {\bf F} \, dA
\)
Green's Theorem the 2-D vector field \({\bf F} (x,y) = \langle P(x,y), Q(x,y)\rangle\) involves
\(Q_x - P_y\),
which is the \(z\)-component of the curl of
the associated 3-dimensional vector field \(\langle P(x,y), Q(x,y), 0\rangle\).
For this reason, some books and youtube videos define the curl
of a 2-D vector field to be \(\text{curl} \, {\bf F} = Q_x - P_y\).
With this definition, Green's theorem says
\(\displaystyle \oint_{\mathcal C} {\bf F}\cdot d{\bf r} =
\iint_{\mathcal D} \text{curl} \, {\bf F} \, dA \)
Graphs of 2-D vector fields with constant divergence and curl.
Here is the Mathematica Notebook, VectorFieldDivCurl.nb that made that pdf.
Videos
Divergence Theorem 1
Divergence Theorem 1
Divergence Theorem to Evaluate Flux Integral (Spherical Coordinates)
3D divergence theorem intuition
Flux and the divergence theorem
Divergence Theorem explanation
Section 17.2: Stokes’ Theorem:
Paul’s notes
Let \(\mathcal S\) be an oriented, smooth surface in \(\mathbb{R}^3\), and let \(\mathcal C\) be the boundary of \(\mathcal S\) oriented so the right-hand-rule makes the thumb point with the orientation of \(\mathcal S\). Sometimes we write \(\mathcal C = \partial \mathcal S\) which is read “\(\mathcal C\) is the boundary of \(\mathcal S\)”. Let \({\bf F}: \mathbb{R}^3 \to \mathbb{R}^3\) be a smooth vector field.
Stokes’ Theorem says that
\( \displaystyle \oint_{\mathcal C} {\bf F}\cdot d{\bf r} = \iint_{\mathcal S} \left (\nabla \times {\bf F} \right ) \cdot d{\bf S}.\)
Justification of Stokes’ Theorem, picture of the white board
StokesTheorem.pdf.
Videos
Stokes’ Theorem 1
Stokes’ Theorem 2
Stokes’ theorem intuition
Stokes’ Theorem
Section 17.1: Green’s Theorem:
Paul’s notes
Suppose \({\bf F}: \mathbb{R}^2 \to \mathbb{R}^2\) is defined by \({\bf F} (x,y) = \langle P(x,y), Q(x,y)\rangle\), and suppose that \(\mathcal C\)
is a positively oriented (CCW), piecewise smooth, simple (no self-intersections), closed curve in \(\mathbb{R}^2\). Let \(\mathcal D\) be the region enclosed by \(\mathcal C\). Then
\(\displaystyle \oint_{\mathcal C} {\bf F}\cdot d{\bf r} =
\iint_{\mathcal D} \left (Q_x - P_y \right ) \, dA \)
Justification of Green’s theorem, pictures of the white board: Part 1, Part 2.
Videos
Green's Theorem
Green's Theorem 2
Green's Theorem to find Area Enclosed by Curve
(See my example below)
Area using Line Integrals
Example: Find the area of the region enclosed by the curve \(C\) with parameterization \({\bf r}(t) = \langle 5 \cos(t) + \sin(2t), 3 \sin(t) + \cos(2t) \rangle \), \(0 \leq t \leq 2\pi\).
We cannot solve for \(y = f(x)\) at the top or bottom boundaries, so \(A = \int_a^b (y_t(x) -y_b(x) ) \, dx\) is doomed to failure.
Solution: Choose \(\langle P, Q \rangle = \langle 0, x\rangle\) or any other linear vector field that satisfies \(\frac{\partial Q}{\partial x} - \frac{\partial P}{\partial y} = 1\).
Then apply Green’s theorem “backwards” to get
\[A = \iint_D dA = \oint_C \langle 0,x \rangle \cdot {d \bf r} = \oint_C x \, dy =\int_0^{2\pi} x \frac{dy}{dt} \, dt =
\int_0^{2\pi} (\cos(t) + \sin(2t))(3\cos(t) - 2 \sin(2t)) \, dt\]
This is not an easy integral, so I'll use technology to evaluate it. Wolfram alpha tells me that
\(A = 13\pi \approx 40.8\).
This Desmos graph shows that the area is a bit larger than 36, the area of the triangle with vertices (0, -4), (6,2), and (-6,2). This gives some confidence in the answer.
Section 16.4 and 16.5: Surface Integrals
Paul's notes on parametrized surfaces
Paul's notes on Surface Integrals of
scalar fields
and
vector fields
Suppose \(\mathcal S = \{ {\bf r}(u, v) \in \mathbb R^3 \mid a \leq u \leq b, \ c \leq v \leq d \}\) is a parameterized surface.
An example is Archimedes' screw, which is related to a helicoid.
The surface integral of \(f: \mathbb{R}^3 \to \mathbb{R}\) is
\( \displaystyle \iint_\mathcal S f \, dS = \int_a^b \int_c^d f({\bf r}(u,v)) \|{\bf r}_u \times {\bf r}_v \| \, dv \, du\).
A special case is the surface integral of \(f = 1\), the constant function. The surface area of \(\mathcal S\) is \(\displaystyle A = \int_\mathcal S \, dS = \int_a^b \int_c^d \|{\bf r}_u \times {\bf r}_v \| \, dv \, du\).
The surface integral of \({\bf F}: \mathbb{R}^3 \to \mathbb{R}^3\), also called the flux of \(F\) through \(\mathcal S\), is
\( \displaystyle \iint_\mathcal S {\bf F}\cdot d{\bf S} = \int_a^b \int_c^d {\bf F}({\bf r}(u,v)) \cdot ({\bf r}_u \times {\bf r}_v) \, dv \, du\).
The value of both of these surface integrals is a scalar (a real number).
The surface integral of a vector field is usually easier to compute and has more applications.
The surface integrals can be summarized by
\(dS = \| {\bf r}_u \times {\bf r}_v \| du \, dv \) and
\(d {\bf S} = ({\bf r}_u \times {\bf r}_v) du \, dv = \hat{\bf n} \, dS\).
Videos of surface integrals of scalar fields
Parameterized Surfaces
Area of a Parameterized Surface
Surface Integrals
Surface Integrals 2
Surface Integral triangular region
Videos of surface integrals of vector fields
Surface Integral of Vector Field
Surface Integral of Vector Field 2
Surface Integral Using Polar Coordinates
Section 16.3: Conservative Vector Fields
Paul's notes on
Fundamental Theorem of Line Integrals
and
Conservative Vector Fields
With the same \( \mathcal C\) and \(f\) from section 16.2, the fundamental theorem of line integrals is
\(\displaystyle \int_{\mathcal C} \nabla f \cdot d{\bf r} = f({\bf r}(b)) - f({\bf r}(a))\).
A gradient vector field is a conservative vector field is a path-independent vector field.
Videos
Fundamental Theorem of Line Integrals
Closed curve line integrals of conservative vector fields
Conservative Vector Fields
Fundamental theorem of line integrals
Section 16.2: Line Integrals (Sometimes called Curve Integrals)
Paul's notes for Line integrals of
Scalar Fields
and
Vector Fields.
Suppose \(\mathcal C = \{ {\bf r}(t) \in \mathbb{R}^3 \mid a \leq t \leq b\}\) is a parameterized curve in 3-D space. (The formulas for curves in the 2-D plane are similar.)
The integral of \(f: \mathbb{R}^3 \to \mathbb{R}\) over the curve \(\mathcal C\) is
\( \displaystyle \int_\mathcal C f \, ds = \int_a^b f({\bf r}(t)) \|{\bf r}'(t) \| \, dt\), which is a scalar.
A special case is the line integral of \(f = 1\), the constant function. The length of \(\mathcal C\) is \(\displaystyle L = \int_\mathcal C ds = \int_a^b \|{\bf r}'(t) \| \, dt\), a topic from section 13.3.
The line integral of \({\bf F}: \mathbb{R}^3 \to \mathbb{R}^3\) over the curve \(\mathcal C\) is
\( \displaystyle \int_\mathcal C {\bf F}\cdot d{\bf r} = \int_a^b {\bf F}({\bf r}(t)) \cdot {\bf r}'(t) \, dt\), which is a scalar.
The line integral of a vector field function is usully easier to compute and has more applications.
Videos on Line Integrals of Scalar Fields (Curve integrals of scalar fields)
Line integral 2D
Line integral 3D
Mass of wire
Videos on Line Integrals of Vector Fields (Curve integrals of vector fields)
Parametrization piecewise
Work
Differential form
Line segment
Section 16.1: Vector Fields
Paul's notes on Vector Fields and
Paul's notes on Curl and Divergence
There are tons of applications for vector fields!
Here is a wind map of the USA. Here is the wikipedia page for
Maxwell's Equations which describe electric and magnetic fields (E and B).
Here is a picture of a
vortex behind an airplane wing.
Here is a GeoGebra app to plot a 2D vector field.
Here is my web page on gradient vector fields.
Here is a notebook to
plot a 2-dimensional vector field with
Mathematica. You can also search the web for programs.
Most vector field plotters scale the vectors.
Videos
Two-dimensional vector fields
Divergence and curl (definitely watch this)
Divergence
Sign of the Divergence
Curl
Curl intuition
Curl nuance
Three-dimensional vector fields
Divergence 1
Divergence 2
Curl 1
Curl 2
Curl 3
Section 15.6: Changes of Variables Paul's notes on Change of Variables
Change of Variables Formula: Let \( (x, y) = G(u, v) \) and assume
\(\mathcal D = G([a,b] \times [c,d])\). That is, the region \(\mathcal D\)
is the image of the rectangle with \(a \leq u \leq b, \ c \leq v \leq d\). Then
\(\displaystyle \iint_{\mathcal{D}} f(x,y) dx dy = \int_a^b \int_c^d f(G(u,v))
\left | \textstyle \frac{\partial (x,y)}{\partial (u, v)} \right | dv \, du\), where
\( \frac{\partial (x,y)}{\partial (u, v)} = \text{det} \begin{bmatrix} \frac{\partial x}{ \partial u} & \frac{\partial x}{ \partial v} \\ \frac{\partial y}{ \partial u} & \frac{\partial y}{ \partial v} \end{bmatrix} \) is the Jacobian of \(G\), also called \(\text{Jac}(G)\).
In other words, \(dA = dx \, dy = \left | \frac{\partial(x,y)}{\partial(u,v)} \right | du \, dv\).
The Change of Variables Formula is a generalization of the substitution rule for definite integrals from Calc I. Here is the one-dimensional version of our new formula:
Let \(x = g(u) \), and assume \(a < b\) and \(g'(u) > 0\).
Then
\( \displaystyle \int_{g(a)}^{g(b)} f(x) \, dx = \int_a^b f(g(u)) g'(u) \, du \).
Note that the \(x\) and \(u\) variables are switched from the usual formula!
The focus in Calc III is on a way to handle the region \(\mathcal D\), whereas
the focus in Calc I was on finding antiderivatives.
Here is my Mathematica File showing examples of a Change of Variables. You might not be able to run mathematica files, but here is the pdf version, ChangeOfVariable.pdf.
Here is a Desmos graph to help with Problem 6. And here is a scan of the fully worked-out solution.
Here is a Desmos graph to help with Problem 7.
Section 15.5: Applications
Paul's does not have a stand-alone section on applications.
Videos
Mass 3D
Center of mass of triangle
Center of mass of cube
Center of mass paraboloid
Section 15.4: Double integrals in Polar Coordinates, Triple integrals in Cylindrical or Spherical Coordinates Paul's notes about polar, cylindrical, and spherical coordinates.
\(dA = r \, dr \, d\theta\) Polar coordinates
\(dV = r \, dr \, d\theta \, dz\) Cylindrical Coordinates
\(dV = \rho^2 \sin(\phi) d\rho \, d\phi \, d\theta\) Spherical Coordinates.
Here is a scan of the Spherical Volume Element, from p. 861 of Rogawski and Adams, Calculus, Early Transcendentals (Third edition).
Videos
my video about
Integrals in spherical and cylindrical coordinates
Changing to polar
Changing to cylindrical
Volume of sphere
Spherical coordinates
Section 15.3: Triple Integrals Paul's notes
The triple integral of a function \(f: \mathbb{R}^3 \to \mathbb{R}\) over a box \(\mathcal{B} = [a,b]\times[c,d]\times[e,f] = \{(x,y,z) \in \mathbb{R}^3 \mid a \leq x \leq b, c \leq y \leq d, e \leq z \leq f \} \) is
\(\displaystyle \iiint_\mathcal{B} f(x,y,z)\, dV = \int_a^b \int_c^d \int_e^f f(x,y,z) \, dz \,dy \,dx \).
As with double integrals, we hope for the integrand to be a product of three functions of 1 variable. In this case, \(\displaystyle \iiint_\mathcal{B} f(x) g(y) h(z) \, dV = \left ( \int_a^b f(x) \, dx \right ) \left ( \int_c^d g(y) \, dy \right ) \left (\int_e^f h(z) \, dz \right ) \).
The triple integral of a function \(f: \mathbb{R}^3 \to \mathbb{R}\) over the ''Type I of VI'' region \(\mathcal{W} = \{(x,y,z) \in \mathbb{R}^3 \mid a \leq x \leq b, \ h_1(x) \leq y \leq h_2(x), \ g_1(x,y) \leq z \leq g_2(x,y) \} \) is
\(\displaystyle \iiint_\mathcal{W} f(x,y,z)\, dV = \int_a^b \int_{h_1(x)}^{h_2(x)} \int_{g_1(x,y)}^{g_2(x,y)} f(x,y,z) \, dz \,dy \,dx \).
Paul does not write this formula. Instead, he writes this as a double integral,
\(\displaystyle \iiint_\mathcal{W} f(x,y,z)\, dV = \iint_{\mathcal D} \left ( \int_{g_1(x,y)}^{g_2(x,y)} f(x,y,z) \, dz \right ) \,dA \), where
\( \mathcal D = \{ (x, y) \in \mathbb{R}^2 \mid a \leq x \leq b, \ h_1(x) \leq y \leq h_2(x) \}\). The two expressions are equivalent, when the double integral is written as an iterated integral.
Here is a desmos graph of the region in problem 4.
Here is a desmos graph of the region in
problem 5, in the case where the sphere has radius 8. This desmos graph also shows that shadow of the solid in the x-y plane, which is very helpful for solving the webwork problem!
Set 15.3 Extra Credit is worth 2 class points, and asks you to program
the Midpoint Rule to approximate a triple integral.
Videos
Triple integral
This video uses the expression I wrote, but which is not in Paul's notes. See time 2:00 in the video.
Tetrahedron
Cylinder
Volume
Different order of integration
Section 15.2: Double Integrals over Non-Rectangular Regions Paul's notes
Let \(\mathcal D = \{ (x,y) \in \mathbb{R}^2 \mid a \leq x \leq b, \
g_1(x) \leq y \leq g_2(x) \} \). Then we can integrate \(f\) over the region \(\mathcal D\) as follows:
\(\displaystyle \iint_D f(x,y) \, dA = \int_a^b \left ( \int_{g_1(x)}^{g_2(x)} f(x,y) \, dy \right ) dx\). Note that the thing inside the parentheses is just a function of \(x\). This \(\mathcal D\) is called a type I region in Paul's notes. There is also a type II region,
for which the "outside" integral is \(\int_c^d \cdots dy \). Note that many regions are neither type I nor type II.
Videos
Triangular region
More general region
More general region
Both order of integration
Change order of integration
Change order of integration
Section 15.1: Double Integrals over Rectangles Paul's notes and more of Paul's notes
\(\displaystyle \iint_{[a,b]\times[c,d]} f(x,y)\, dA = \int_a^b \left ( \int_c^d f(x,y) \,dy \right ) \,dx = \int_c^d \left (\int_a^b f(x,y) \,dx \right ) \,dy\).
Usually the parentheses are left out. The super-simple special case is ...
\(\displaystyle \iint_{[a,b]\times[c,d]} f(x) g(y)\, dA = \left( \int_a^b f(x) \, dx \right ) \left ( \int_c^d g(y) \,dy \right )\).
Videos
Double integrals
Approximate volume from table of values
Approximate double integral from contour plot
Fubini
Double integral on rectangular region
Average value over rectangular region
Section 14.8: Optimization and Lagrange Multipliers
Paul's notes
Many of the optimization problems from Calc 1 can be easily done with Lagrange Multipliers. This new method also give insight into the solutions of these optimization problems.
See Paul's notes on Optimization. Here is my solution to example 4 in Paul's notes, which is
similar to problem 5. Note that the condition that \(h = 2r\) for an optimal solution follows
naturally using the method of Lagrange Multipliers. (Also, the two pages of that scanned pdf are out of order.)
Videos
Lagrange Multipliers two variables one constraint
Lagrange Multipliers three variables one constraint
Global extrema on disk
Section 14.7: Part 2: Local Extrema
Paul's notes
on relative extrema which is another word for local extrema.
Here is a Desmos 3D graph of quadratic functions \(f(x,y)\) with a critical point at \((0,0)\).
Here is a Desmos 3D graph of a cubic function \(f(x,y)\) with a critical point at \((0,0)\). The graph is called a "Monkey Saddle", since there room for the monkey's tail as well as their two legs.
Videos
Critical points, second derivative test
Local extrema
Local extrema
Minimum distance of point from plane
Minimum surface area of box
Maximum volume of box
Minimum cost of box
Distance between point and cone
Section 14.7: Part 1: Global Extrema
Paul's notes
on absolute extrema which is another word for global extrema.
For this section, we refer back to the global extrema of functions \(f: [a,b] \to \mathbb{R}\) in Paul's notes.
For today's homework you need these definitions:
Consider the function \(f: D \to \mathbb{R}\) with domain \(D \subseteq \mathbb{R}^2\).
The point \((a,b) \in D\) is a critical point of \(f\) provided \( \nabla f(a,b) = \langle 0,0\rangle\) or \(\nabla f(a,b)\) does not exist.
We say that \(f\) has a global maximum at \((x_1, y_1)\) provided \((x_1, y_1) \in D\) and \(f(x_1, y_1) \geq f(x,y)\) for all \((x,y) \in D\). In this case we say that the global maximum value of \(f\) is \(f(x_1, y_1)\).
Videos
Global extrema, rectangular domain
Global extrema, circular domain
Section 14.6: The Chain Rule.
Paul's notes
The chain rule for paths: Let \(f: \mathbb R^n \to \mathbb R\) be a real-valued function of 2 or 3 variables,
and \({\bf r}: \mathbb R \to \mathbb R^n\) be the position of a particle moving in the domain
of \(f\). Then \(f({\bf r}(t)) \) is the value of
\(f\) that the particle experiences at time \(t\). The Chain Rule for Paths says that
\(\frac d {dt} f({\bf r}(t)) = \nabla f({\bf r}(t)) \cdot {\bf r}'(t)\).
Example: Let \(f(x,y) = 1.5 + 0.3 x + 0.2 y\) and \({\bf r}(t) = (\cos(t), \sin(t) ) \).
Write down \(k : \mathbb R \to \mathbb R\) defined by \(k(t) = f({\bf r}(t)) \) and compute
\(k'(t) = \frac{d}{dt} f({\bf r}(t))\). Then, compute \(\nabla f({\bf r}(t)) \cdot {\bf r}'(t)\) and show that the Chain Rule for Paths holds.
Here is a Desmos 3D graph of this example.
If \(z = f(x,y), x = g(t)\), and \(y = h(t)\), the Chain Rule for Paths becomes
\(\frac {dz}{dt} = \frac{\partial z}{\partial x} \frac{dx}{dt} + \frac{\partial z}{\partial y} \frac{dy}{dt}\). This is case 1 in Paul's notes.
Figure showing the dependency diagram for Problem 4 on the webwork.
Videos
Chain rule with partial derivatives from the Organic Chemistry tutor
The Multi-variable chain rule from Trefor Bazett
Section 14.5: The Gradient and Directional Derivatives.
Paul's notes on the directional derivative
and the
gradient
For \(f: \mathbb R^2 \to \mathbb R\), the gradient of \(f\) is
the function \(\nabla f: \mathbb R^2 \to \mathbb R^2\) defined by
\(\nabla f(x,y) = \langle f_x(x,y), f_y(x,y)\rangle\).
Thus, the gradient of \(f\) evaluated at the point \((a,b) \in \mathbb R^2\)
is the vector \(\nabla f(a,b) = \langle f_x(a,b), f_y(a,b)\rangle\).
The directional derivative of \(f: \mathbb R^2 \to \mathbb R\) in the direction of \({\bf v} \in \mathbb R^2\) at the point \((a,b) \in \mathbb R^2\) is defined as \(D_{\bf v}f(a,b) = g'(0)\), where \(g(t) = f((a,b) + t \hat{\bf v}) \), where \(\hat{\bf v} = \frac{\bf v}{\|\bf v\|}\) is the unit vector in the direction of \(\bf v\). The best way to compute the directional derivative is \(D_{\bf v}f(a,b) = \nabla f(a,b) \cdot \hat{\bf v}\).
My web page on gradients.
Videos
My video on problem 6 in the WeBWorK
My video on problem 8 in the WeBWorK
Gradient
Directional Derivative
Directional Derivatives and the Gradient
Max rate of change
Directional Derivative in 3D calc plotter
Gradient in 3D calc plotter
Normal vector
Tangent plane example
Section 14.4: The Tangent Plane to the graph \(z = f(x,y)\)
The local linearization of \(f: \mathbb{R}^2 \to \mathbb{R}\) at \( (x,y) = (a,b) \) is \(L(x,y) = f(a,b) + f_x(a,b)(x-a) + f_y(a,b)(y-b)\).
An equation of the tangent plane to \(z = f(x,y)\) at \((x,y, z) = (a,b, f(a,b) )\) is
\(z = L(x,y)\).
The tangent plane approximation is \(f(x,y) \approx L(x,y) \) for \( (x,y) \approx (a,b) \).
Paul's notes
Videos
Local linearization
Tangent plane
Tangent plane (exponential)
Tangent plane (trigonometric)
14.3: Partial derivatives
Paul's notes have 3 sections:
Partial derivatives,
their interpretation, and
higher order partial derivatives
Here are pictures of a demonstration that mixed partial derivatives are equal:
page 1 and page 2.
Videos
Partial derivatives
Partial derivative example
Partial derivative from contour plot
Second partial derivatives
Second partial derivatives
Section 14.2: Limits of Real-Valued Functions of Two Variables
Paul's notes
Videos
Limits are...weird..for multi-variable functions
Limits of Functions of Two Variables
Example 1
Example 2
Example 3
Section 14.1: Real-Valued Functions of Several Variables
Paul's Notes.
Here is a reminder about the web-based apps for 3D graphing:
Desmos 3D,
GeoGebra 3D calculator, and (probably the best choice)
CalcPlot3D app.
Feel free to let me know about other apps.
Here is a pdf of the level surface of problem 12 in set 14.1.
Even though this is a static image, it is much easier to decipher than the figure in webwork. This new pdf also shows the slices with \(x, y\) or \(z = 0\) or \(\pm 2.5\) in blue. For example, you can count 2 slices down from the blue \(z = 0\) slice to see the slice at \(z = -1\). (The distance between slices is \(\Delta x, \Delta y\), or \(\Delta z = 0.5\).)
Hint: Consider the symmetry of the surface. For example, the slices at \(x = -1\) and \(x = 1\) look the same. Also, the four slices at \(z = \pm 1\) and \(y = \pm 1\) all look the same!
That image for problem 12 was made with Mathematica. See this site with a link to Mathematica at NAU. You can get Mathematica for your own computer for free since we have a site license!
Videos
Finding domain
Level curves, contour plot
Function value from contour plot
Increasing or decreasing from contour plot
Traces
Graph Two Variable Function with 3D Calc Plotter
Contour plot with 3D Calc Plotter
Midterm 1 was in class on Monday, September 22.
A sample Midterm 1 with solutions are posted on Canvas.
Section 13.3: Speed, velocity, and acceleration
Paul's notes on Arc Length with Vector Functions
Paul's notes on Velocity and Acceleration
Videos
Velocity, speed, direction, and acceleration
Velocity and Position from Acceleration
Here are the scanned solutions scanned solutions to the quiz on Vectors, Lines, and Planes. Here is a Desmos 3D graph of problem 2 on the quiz.
Here is the classic Monkey Gun from physics. Just point the blow gun at the monkey.
If the monkey lets go of the branch at the instant the dart is shot, the monkey will be hit regardless of the speed of the dart. This follows from the projectile motion equation, assuming the acceleration of gravity is 10 m/s^2 down:
\({\bf r}(t) = -5 t^2 {\bf \hat k} + t {\bf v}_0 + {\bf r}_0 \)
Section 13.2: Calculus of vector-valued functions Paul's notes
To find parametric equations for the tangent line to the curve with parametric
equations \({\bf r}_c(t)\), at the point \({\bf r}_0\), do this:
1. Solve \({\bf r}_c(t_0) = {\bf r}_0\) for \(t_0\). (That is, find the time \(t_0\) when the particle is at the point \({\bf r}_0\).)
2. Differentiate each component to find \({\bf r}'_c(t)\), and evaluate \({\bf v} = {\bf r}'_c(t_0)\). (That is, find the velocity of the particle when it is at the point \({\bf r}_0\).)
3. One parametric equatin for the tangent line is
\({\bf r}_\ell(t) = {\bf r}_0 + {\bf v} t\). This is what WeBWorK wants. Another parameterization is \({\bf r}_\ell(t) = {\bf r}_0 + {\bf v} (t-t_0)\). Here is a Desmos3D graph showing a tangent line to a helix.
Videos
Derivative of vector-valued functions
Properties
More properties
Equation of tangent line
Angle of two curves
Integration with Initial Conditions
Definite integral
Section 13.1: Vector-valued functions
Paul's notes
Here are 3 different web-based 3D graphing programs:
Desmos 3D,
GeoGebra 3D calculator, and
CalcPlot3D app.
Feel free to let me know about other apps.
Here is a helix made with Desmos 3D.
Here is are two surfaces in \(\mathbb{R}^3\).
Find a parameterization of the intersection.
Mathematica is available to you with a site license.
Here is a Mathematica notebook, helix.nb,
that will plot a parameterized curve in \(\mathbb{R}^3\).
It is harder to use than some other programs, but the pictures are beautiful.
This Mathematica notebook will Plot 2 Surfaces And 1 Curve.
Videos
Vector valued functions
Domain of a Vector Valued Function
space curves in 3D Calc Plotter
Curve of intersection of two surfaces
Curve of intersection of two surfaces
Vector Valued Function from a Rectangular Equation
Section 12.7: Cylindrical and Spherical Coordinates.
Here are Paul's notes on
polar,
cylindrical, and
spherical coordinates.
BEWARE! Paul lies to you. He writes the formula “\(\theta = \tan^{-1} (\frac y x )\)”,
which is wrong in two ways: (1) That formula is fine in quadrant I but it is false in quadrants II and III,
and (2) it uses the abominable notation “\(\tan^{-1}\)” instead of “\(\arctan\)”.
\(f(\theta) = \tan(\theta)\) is not a one-to-one function so its inverse is not defined. Instead, \(\arctan(t)\) is the unique \(\theta\)
between \(-\pi/2\) and \(\pi/2\) whose tangent is \(t\).
Instead of “\(\theta = \tan^{-1} (\frac y x )\)”, or even “\(\theta = \arctan (\frac y x )\)”, write
“\(\tan(\theta) = \frac y x\)”
To compute \(\theta\) you need to draw a darn diagram!
Here is a figure about how to compute theta in polar or cylindrical
or spherical coordinates using the picture you have drawn.
For those who prefer a formula,
I wrote this algorithm for finding \(\theta\).
Note that \(\frac y x\) is undefined if \(x = 0\), so those cases are handled first.
I don't intend you humans to follow this algorithm exactly: Just draw the #!#! figure.
BEWARE! The roles of \(\theta\) and \(\phi\) are switched in physics and math. We are using the math convention, which is superior. In our math notation, the coordinate \(\theta\) is the same in polar, cylindrical and spherical coordinates: \(\tan(\theta) = \frac y x\).
Here is the worksheet we did in class, about finding \(\theta\). Here are the scanned solutions. (This worksheet is from Calc 2, where we covered polar coordinates.)
Videos
Cylindrical Coordinates
Spherical Coordinates
Cartesian Coordinates to Spherical
Spherical Coordinates to Cartesian
Cartesian Coordinates to Cylindrical
Cylindrical Coordinates to Cartesian
Cylindrical Equations to Rectangular
Rectangular Equations to Cylindrical
Spherical Equations to Rectangular
Rectangular Equation to a Spherical
Spherical Equation to a Rectangular
Section 12.6: Quadratic Surfaces
Paul's notes
Here are some quadratic surfaces
plotted in desmos 3d.
Another option is using the "implicit plot" feature of
CalcPlot3D
CalcPlot3D has more features than desmos 3d, but is consequently harder to use.
Videos
how to plot surfaces in 3D Calc Plotter.
The following videos have more detail than you need. They use the term "quadric surface" which is another name for "quadratic surface". You do not need to learn the names of these surfaces.
Cylindrical Surfaces
Quadric Surfaces
Ellipsoid
Elliptical Cone
Elliptical Paraboloid
Hyperbolic Paraboloid
Section 12.5: Planes in space
Paul's notes
There is a unique line in \(\mathbb{R}^2\) through the
point (2, 3) with the normal vector \(\langle 2, -1 \rangle\).
An equation for this line is \( \langle 2, -1\rangle \cdot \langle x-2, y-3 \rangle = 0\), which becomes
\(2(x-2) - (y-3) = 0\) when you expand the dot product.
Similarly, there is a unique line in \(\mathbb{R}^3\) through the
point (-1, 2, 1) with the normal vector \(\langle 2, -1, 3 \rangle\).
An equation for this plane is \( \langle 2, -1, 3\rangle \cdot \langle x-1, y-2, z-1 \rangle = 0\), which becomes
\(2(x+1) - (y-2) + 3(z-1) = 0\) when you expand the dot product.
Summary: An equation for the plane with normal vector \({\bf n} = \langle a, b,c \rangle \), that goes through the point \({\bf r}_0 = (x_0, y_0, z_0) \) is \( {\bf n} \cdot ({\bf r} - {\bf r_0}) = 0\), where \( {\bf r} = (x, y, z ) \) is the general point on the plane. Computing the dot product gives the equation \(a(x-x_0) + b(y-y_0) + c(z-z_0) = 0\).
Videos
Normal equation of plane
Point of Intersection of a Plane and a Line
Point of Intersection of a Plane and a Line
Intersection to two planes
Line through a point and perpendicular to a plane
Plane given with point and parallel plane
Plane given with three points
Plane given with three points
Plane given with point and orthogonal line
Angle between two planes
Distance between point and plane
Distance between parallel planes
Distance between line and point
Section 12.4: The Cross Product.
Paul's notes
Example: calculation of the cross product done in two ways.
This is my problem 6 on the WeBWorK. You only need to do it one way, but it's comforting that they
give the same answer.
Suggested videos on matrices
Multiplying matrices
2x2 determinant
3x3 determinant
Suggested videos on the cross product
Cross product
Cross product
Cross product example
Area of space triangle
Volume of parallelepiped
Section 12.3: The Dot Product.
Paul's notes
Suggested videos.
Dot product
Angle between vectors
Parallel and perpendicular components
In-class group work. The methane molecule \(C H_4\) has 4 Hydrogen atoms at the vertices
of a tetrahedron, with a single carbon atom at the center.
We can place the carbon atom at \( (0,0,0) \), and the 4 Hydrogen atoms at
\( (1,1,1)\), \((1, -1,-1)\), \( (-1,1, -1)\), and \(( -1,-1,1) \).
This desmos3D graph shows a
Methane molecule.
Find the bond angle, which
is the angle between any two vectors from the carbon atom to a hydrogen atom.
First get an exact angle in terms of the arccos function, then approximate the angle
to the nearest degree using technology.
Solutions.
Here are some formulas needed for the webwork. Only some are in Paul's Notes.
It is easiest to make sense of these formulas using the notation \(\hat{\bf a}\) (pronounced a-hat) for the unit vector in the direction of \(\bf a\). To compute that unit vector, use the formula \(\hat{\bf a} = \frac{\bf a}{\|\bf{a}\|}\).
The component of \(\bf b\) along \(\bf a\) is \(\hat{\bf a} \cdot {\bf b} = \frac{\bf a \cdot {\bf b}}{\| {\bf a} \|} = \| \bf b \| \cos(\theta)\), which is a scalar.
The projection of \(\bf b\) parallel to \(\bf a\) is \({\bf b}_{\| {\bf a}} = (\hat{\bf a} \cdot {\bf b}) \hat {\bf a} = \frac{({\bf a} \cdot {\bf b}) {\bf a}}{\| {\bf a} \|^2}\), which is a vector. Note that the final expression has no square roots.
The projection of \(\bf b\) perpendicular to \(\bf a\) is \({\bf b}_{\perp {\bf a}} = {\bf b} - {\bf b}_{\| {\bf a}} \), which is a vector.
Note that \({\bf b} = {\bf b}_{\| {\bf a}} + {\bf b}_{\perp {\bf a}} \) must hold (by definition), and it turns out that
\({\bf b}_{\| {\bf a}} \cdot {\bf b}_{\perp {\bf a}} = 0\), so these two projections are orthogonal to each other.
Here is a scan of a version of set 12.3, problem 9, with nice numbers. This example should hopefully give some intuition about the parallel and orthogonal projections of vectors.
Section 12.2: Vectors in \(\mathbb{R}^3\)
Paul's notes
Suggested videos.
Parametric equation of line in 3D
Parametric equation of line in 3D
Intersection of two lines
Here is Desmos 3D graph of my version of Problem 8 in Set 1.2.
Section 12.1: Vectors (Note: The section number 12.1 follows the Rogowski and Adams textbook.)
Paul's notes on
basics and
vector arithmetic.
Here is my version of webwork problem 5.
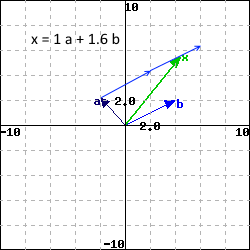
The answer to one version of WeBWorK problem 10 in set 12.1 is
x = a + 1.6 b. (So type 1 and 1.6 into the two blanks.)
This figure shows the vectors.
In class worksheet 2 on vector addition, subtraction, and scalar multiplication. Here are the scanned solutions.
Suggested videos.
Vector operations: Sum, scalar multiple, dot product
Length of a 3D vector
Unit vectors: Direction of a vector
Plotting points
WeBWorK set 01: Review of Calculus
Differentiation Shortcuts
Here is the Big Picture of Calculus.
{kind=link}
{kind=link}
{kind=link}
{kind=link}